Innovating in robotics and AI to advance human performance
Hello! I'm Abhiraj, passionate about building intelligent technologies that blend robotics, AI, and software engineering. My work encompasses control algorithms, computer vision, and developing agentic AI systems, with a strong entrepreneurial drive.
Current Focus
Currently taking a sabbatical from my PhD to explore entrepreneurship through hands-on learning and building. I'm actively developing AI-first solutions that enhance human capabilities in research, education, and robotics, driven by curiosity to translate research into practical, impactful technologies.
Always excited to connect with fellow innovators, researchers, and builders. Feel free to reach out if you'd like to discuss ideas, explore potential collaborations, or simply share insights on robotics, AI, or the entrepreneurial journey.
Recent Work
Master's in Mechanical Engineering from KAIST at ExoLab, specializing in control systems for powered exoskeletons.
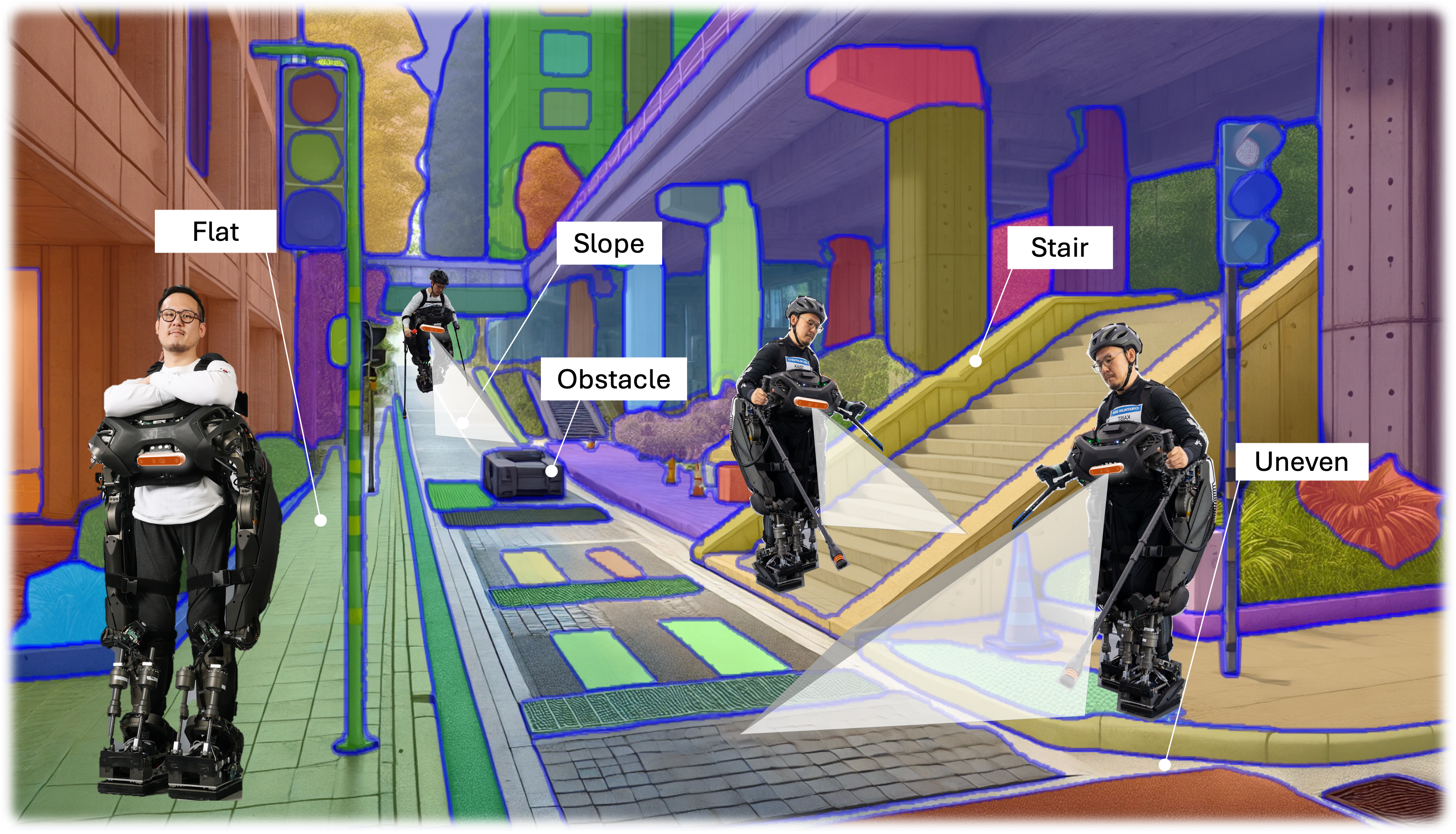
Computer Vision Systems: Designed real-time depth vision based environment recognition enabling powered exoskeletons to autonomously navigate stairs and complex terrain.
Advanced Motion Control: Developed Model Predictive Control (MPC) based trajectory generation algorithm that translates simulation-based trajectories into precise real-world exoskeleton movements. Read more →
Cybathlon 2024: Core motion control team member securing 1st place at Cybathlon 2024 Exoskeleton Race

My Journey
Entrepreneurial Ventures
Currently exploring entrepreneurship, applying my background in robotics, AI, and software engineering to create innovative products that solve real-world problems through intelligent systems.
Masters in Mechanical Engineering - KAIST, South Korea
Specialized in model predictive control and vision-based environment recognition for powered exoskeletons, enabling precise and adaptive trajectory generation during my research at KAIST's ExoLab.
Software Developer - GE Digital
Designed and optimized component-based architecture utilizing Angular framework and built reusable libraries and web apps with TypeScript and Angular.
Bachelors in Mechanical Engineering - IIT Roorkee, India
Courses: Automatic Control, Robotics and Control, Kinematics of Machines, Dynamics of Machines, Modelling and Simulation, Operating System, Data Structures and Algorithms.
Recent Work
Latest projects and research in robotics, AI, and software development.
Sim-to-Real MPC Optimization for WalkOn F1: Lessons from Cybathlon 2024
Optimizing Model Predictive Control (MPC) walking trajectories for the WalkOn F1 exoskeleton that won Cybathlon 2024. An account of real-world sim-to-real challenges and the iterative solutions that bridged the gap between simulation and hardware.

Model Predictive Control for Powered Lower-Body Exoskeleton Robots
Advanced control methodology for powered lower-body exoskeletons using Model Predictive Control (MPC), enabling robust and adaptive operation in dynamic environments.

Identification of Physical Parameters of Body Segments
Estimating the center of mass (CoM) of the leg using the H-10 Hip Assistive Robot and comparing experimental and anthropometric methods for human-assistive robotics.

Latest Posts
Thoughts on robotics, AI, and building technology.
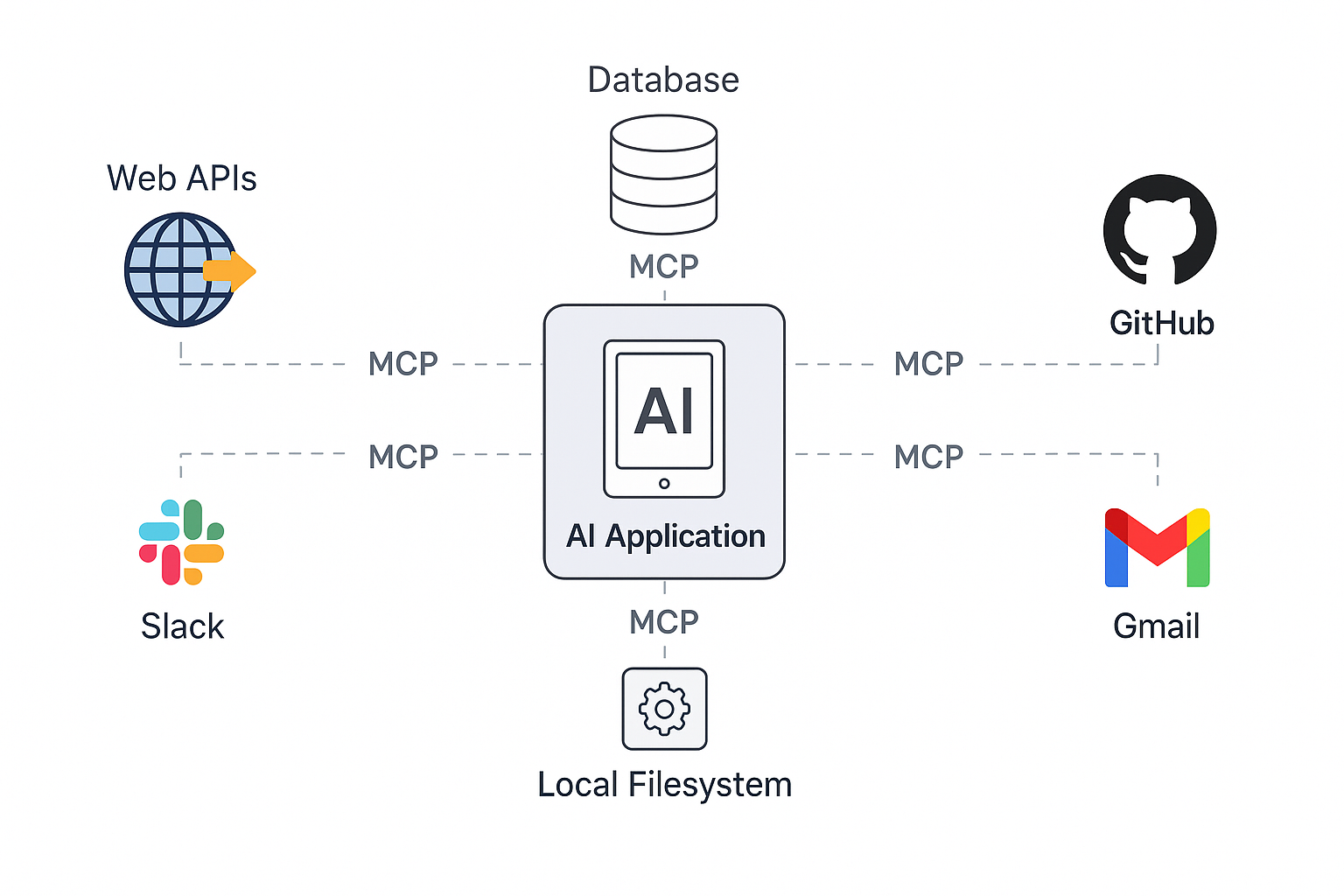
The Model Context Protocol: Transforming AI Agents from Isolated Systems to Connected Ecosystems
An in-depth exploration of the Model Context Protocol (MCP) - the open standard that's enabling AI agents to break free from context limitations and interact dynamically with external systems.
Human-Centric Depth Vision: Intelligent Environment Recognition for Powered Exoskeletons
Exploring how depth cameras and IMU sensors can create intelligent terrain recognition systems that augment human decision-making in powered exoskeleton control, while maintaining the pilot as the ultimate authority.