Model Predictive Control for Powered Lower-Body Exoskeleton Robots

Introduction to Exoskeleton Control Strategies
Powered lower-body exoskeletons have revolutionized mobility solutions for individuals with lower limb disabilities. While commercial exoskeletons like Atalante by Wandercraft and xoMotion employ various control strategies, Model Predictive Control (MPC) has emerged as a powerful approach for trajectory generation and control. This study presents an advanced MPC framework specifically designed for offline trajectory generation in powered lower-body exoskeletons, with particular focus on the WalkOn F1 exoskeleton developed at the Korea Advanced Institute of Science and Technology (KAIST).
WalkOn F1This work specifically addresses the challenge of offline trajectory generation for the WalkOn F1 exoskeleton, which is crucial for:
- Planning stable and efficient walking patterns
- Optimizing energy consumption during operation
- Ensuring smooth transitions between different motion phases
- Maintaining dynamic balance throughout the gait cycle
- Adapting to various walking scenarios and user requirements
The MPC framework developed in this study provides a systematic approach to generating optimal trajectories that satisfy these requirements while considering the exoskeleton's physical constraints and dynamic capabilities. By focusing on offline trajectory generation, we can ensure the safety and reliability of the planned motions before their execution, which is particularly important for users with mobility impairments.
Comparison with Commercial Exoskeletons
Atalante by Wandercraft
Atalante utilizes a full dynamic walking model with self-balancing control, featuring:
- Model Predictive Control (MPC) for real-time trajectory optimization
- Real-time dynamic balance control through MPC-based state estimation
- Advanced algorithms for adaptive gait generation and prediction
- Sensor feedback integration for responsive movements
- Multi-directional locomotion capabilities
- FDA-approved for rehabilitation settings
xoMotion Exoskeleton
xoMotion employs a hybrid control approach combining MPC with machine learning:
- Model Predictive Control for trajectory planning and optimization
- Dynamic balance control with real-time adaptation through MPC
- Continuous learning from user movements for MPC parameter tuning
- Integration of user feedback for personalized assistance
- Support for various walking tasks with MPC-based motion planning
- Full autonomy for complex movements using predictive control
MPC-Based Control Advantages
The MPC framework developed in this study offers several advantages over traditional control methods:
- Predictive capability for robust trajectory generation
- Explicit handling of system constraints
- Optimal performance through cost function minimization
- Offline trajectory generation for precise motion planning
- Comprehensive state estimation and sensor fusion
This post focuses on developing an MPC-based control strategy that can generate optimal trajectories for powered lower-body exoskeletons, with particular emphasis on stability, efficiency, and adaptability to different user needs and environmental conditions.
1. System Modeling
State-Space Model
The state of a multibody system is described by:
where are generalized coordinates and are velocities.
 System Architecture and Sensors
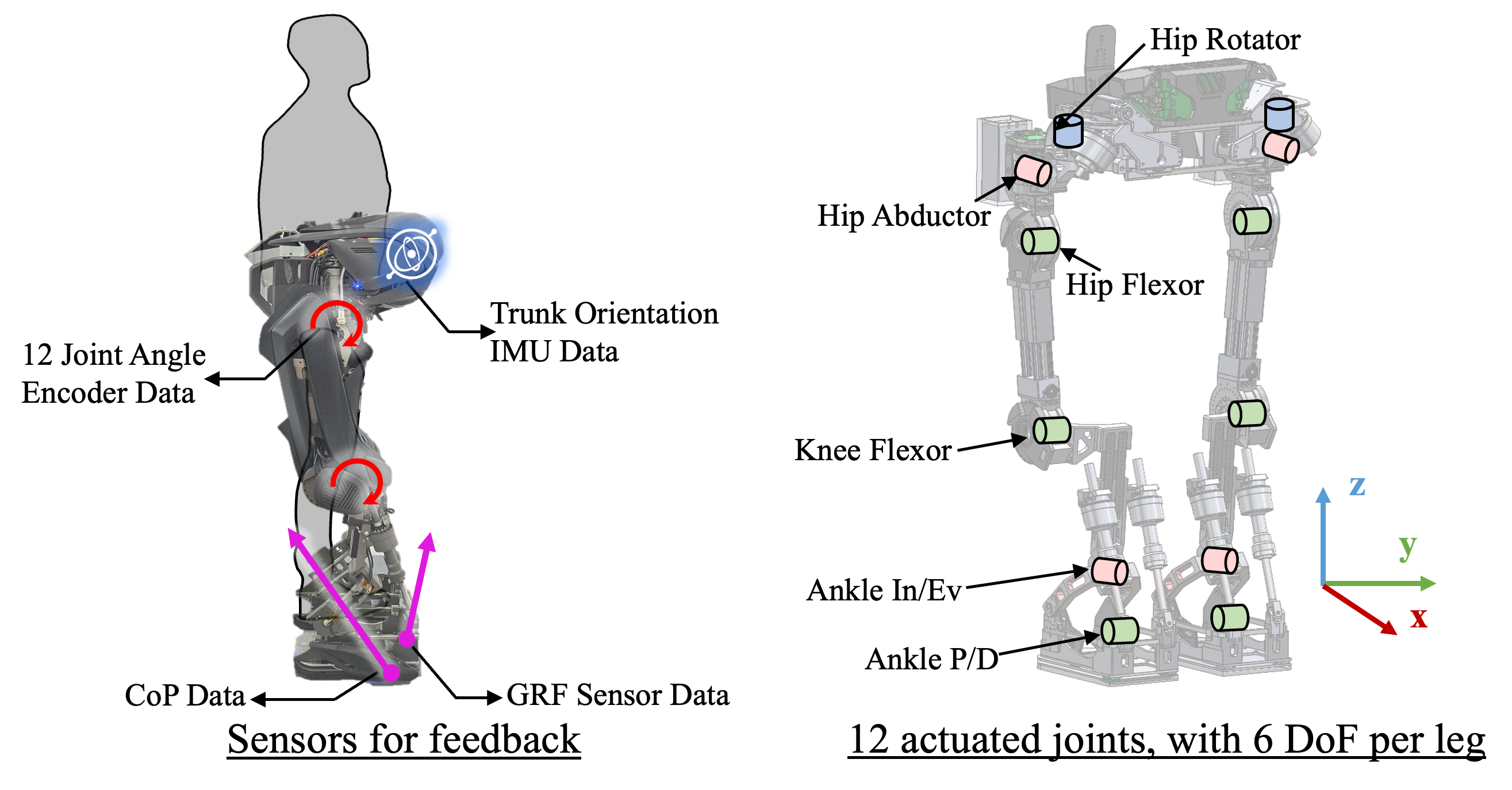
System Architecture and SensorsFigure: WalkOn-F1 exoskeleton system architecture. The exoskeleton features 12 actuated joints (6 degrees of freedom per leg), including hip, knee, and ankle joints. Key sensors for feedback include joint angle encoders, an IMU for trunk orientation, and foot sensors for Center of Pressure (CoP) and Ground Reaction Force (GRF) data. This hardware configuration provides the necessary state informations: joint positions, velocities, and external forces, used in the state-space model and system modeling described in this section.
Implementation:
self.actuation = crocoddyl.ActuationModelFloatingBase(self.state)Algorithmic Context: Robot Model Initialization
The robot model initialization involves setting up the exoskeleton's kinematic and dynamic properties, which are essential for accurately simulating its behavior. This includes defining the model's joints, links, and actuation mechanisms.
Mathematically, the robot model can be represented by:
Where:
- is the vector of generalized coordinates, consisting of the base position and orientation () and the joint angles ().
- is the vector of generalized velocities, consisting of the base linear and angular velocities () and the joint velocities ().
- is the total number of generalized coordinates, is the total number of generalized velocities, and is the number of actuated joints.
class GaitControlMPC:
def __init__(self, rmodel, rightFoot, leftFoot, integrator="euler", control="zero",
fwddyn=True, firstStep=False):
self.rmodel = rmodel
self.rdata = rmodel.createData()
self.state = crocoddyl.StateMultibody(self.rmodel)
self.actuation = crocoddyl.ActuationModelFloatingBase(self.state)
self.rfId = self.rmodel.getFrameId(rightFoot)
self.lfId = self.rmodel.getFrameId(leftFoot)
self._integrator = integrator
self._control = control
self._fwddyn = fwddyn
q0 = np.zeros(self.rmodel.nq)
self.rmodel.defaultState = np.concatenate([q0, np.zeros(self.rmodel.nv)])
self.mu = 0.3
self.Rsurf = np.eye(3)
self.footBox = np.array([0.32, 0.17]) * 0.25
self.comInitialHeight = pin.centerOfMass(self.rmodel, self.rdata, q0)[2]Equations of Motion
- : mass/inertia matrix
- : Coriolis/centrifugal
- : gravity
- : control inputs
Implementation:
# Mass matrix
pin.crba(self.rmodel, self.rdata, q)
# Coriolis
pin.computeCoriolisMatrix(self.rmodel, self.rdata, q, q_dot)
# Gravity
pin.computeGeneralizedGravity(self.rmodel, self.rdata, q)Discrete-Time State-Space Update
Initial State and Control Input
The initial state vector includes the initial positions and velocities of the exoskeleton's joints and links:
Where:
- is the initial generalized coordinates.
- is the initial generalized velocities.
The initial control input vector represents the initial torques or forces applied to the exoskeleton's joints and floating base:
Where:
- represents the forces and torques applied to the floating base.
- represents the torques applied to the actuated joints.
class GaitController:
def __init__(self, WPGmodel: GaitControlMPC, robot, rightFoot, leftFoot, display):
self.robot = robot
self.rightFoot = rightFoot
self.leftFoot = leftFoot
self.display = display
self.WPG = WPGmodel
self.knotScaler = 1
self.timeStep = 0.01
self.initialize()
def initialize(self):
self.gait = self.WPG(self.robot.model, self.rightFoot, self.leftFoot)
self.gait.RL_StairN = np.array([0, 0])
q0 = self.robot.q0.copy()
v0 = pin.utils.zero(self.robot.model.nv)
self.x0 = np.concatenate([q0, v0])
self.x_last = self.x0
self.xs = np.array([self.x_last])
self.xs_hist = np.array([])
self.us_hist = np.array([])Algorithmic Context: State Prediction in the MPC Loop
State prediction is the first step in the MPC loop, where the future states of the exoskeleton are estimated based on the current state and control inputs. This prediction forms the basis for the optimization problem that follows.
The predicted state at time step is obtained using the system dynamics model:
where:
- is the state vector at time step ,
- is the control input vector at time step ,
- represents the system dynamics function, incorporating both kinematic and dynamic models of the exoskeleton.
In the provided code, state prediction is handled within the Crocoddyl framework using the differential action models defined for various phases of the exoskeleton's motion. The key component for state prediction is the forward dynamics integration, which updates the state based on the current control input. This estimated state is then used as the starting point for the MPC optimization at each control cycle.
 Terrain Analyzer for Step Planning
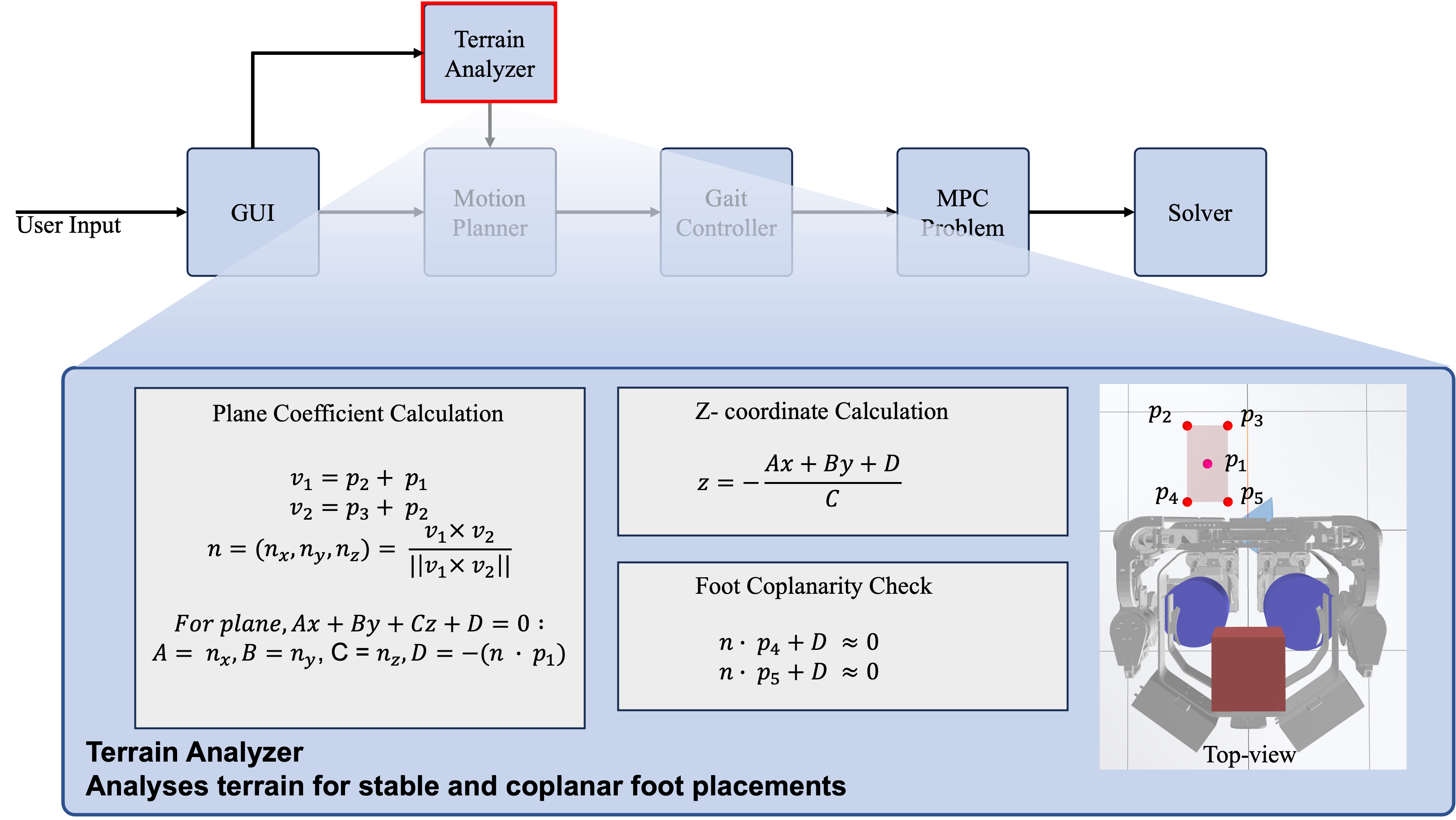
Terrain Analyzer for Step PlanningFigure: The Terrain Analyzer module evaluates the safety and feasibility of each next step before execution. It analyzes the terrain to ensure stable and coplanar foot placements, calculates the supporting plane coefficients, and determines the height of the next step. This process is essential for robust and adaptive exoskeleton walking, as it prevents unsafe steps and enables the exoskeleton to adapt to uneven or changing surfaces.
3. Constraints
State Constraints
Implementation:
xlb = np.concatenate([...])
xub = np.concatenate([...])
bounds = crocoddyl.ActivationBounds(xlb, xub, 1.0)
xLimitResidual = crocoddyl.ResidualModelState(self.state, np.zeros_like(x0), nu)
xLimitActivation = crocoddyl.ActivationModelQuadraticBarrier(bounds)
limitCost = crocoddyl.CostModelResidual(self.state, xLimitActivation, xLimitResidual)
costModel.addCost("xLimit", limitCost, 1e10)Control Input Constraints
Implementation:
ctrlResidual = crocoddyl.ResidualModelControl(self.state, nu)
ctrlReg = crocoddyl.CostModelResidual(self.state, ctrlResidual)
costModel.addCost("ctrlReg", ctrlReg, 1e2)Contact Constraints (Friction Cone)
Implementation:
cone = crocoddyl.WrenchCone(self.Rsurf, self.mu, self.footBox)
wrenchResidual = crocoddyl.ResidualModelContactWrenchCone(self.state, i, cone, nu, self._fwddyn)
wrenchActivation = crocoddyl.ActivationModelQuadraticBarrier(crocoddyl.ActivationBounds(cone.lb, cone.ub))
wrenchCone = crocoddyl.CostModelResidual(self.state, wrenchActivation, wrenchResidual)
costModel.addCost(self.rmodel.frames[i].name + "_wrenchCone", wrenchCone, 1e4)Algorithmic Context: Constraint Handling in the MPC Loop
Constraint handling ensures that the exoskeleton's motion adheres to physical and operational limits, such as joint position and velocity bounds, contact force limits, and obstacle avoidance.
The constraints can be expressed as:
where:
- are the state bounds,
- are the control input bounds,
- represents other constraint functions, such as contact stability.
In the code, constraints are integrated into the optimization problem using Crocoddyl's activation and residual models. For example, joint limits and velocity bounds are handled by setting up quadratic barrier costs, while contact forces are managed using wrench cone constraints. These constraints are enforced at each time step within the prediction horizon, ensuring that the generated motion is both feasible and safe for the exoskeleton and its user.
4. Cost Function
Quadratic Cost Formulation
- State deviation penalty:
- Control effort penalty:
- Terminal state penalty:
Implementation:
stateResidual = crocoddyl.ResidualModelState(self.state, self.rmodel.defaultState, nu)
stateActivation = crocoddyl.ActivationModelWeightedQuad(stateWeights**2)
stateReg = crocoddyl.CostModelResidual(self.state, stateActivation, stateResidual)
ctrlResidual = crocoddyl.ResidualModelControl(self.state, nu)
ctrlReg = crocoddyl.CostModelResidual(self.state, ctrlResidual)
costModel.addCost("stateReg", stateReg, 1e1)
costModel.addCost("ctrlReg", ctrlReg, 1e2)Algorithmic Context: Cost Calculation in the MPC Loop
The cost calculation step involves evaluating the cost function for the predicted states and control inputs. The cost function quantifies the performance of the exoskeleton's control strategy, penalizing deviations from the desired trajectory, excessive control inputs, and violations of constraints.
The cost function at time step can be expressed as:
where:
- is the state weighting matrix,
- is the control input weighting matrix,
- is the terminal state weighting matrix,
- is the prediction horizon.
The provided code defines various cost models using Crocoddyl's 'CostModelSum' class, which aggregates different cost components such as state regularization, control regularization, and task-specific costs like foot trajectory tracking and center of mass (CoM) positioning. These cost models are then used by the optimization solver to evaluate and minimize the total cost over the prediction horizon, ensuring that the exoskeleton follows the desired trajectory while minimizing control effort and respecting constraints.
5. Contact and Friction Models
Contact Model
Implementation:
contactModel = crocoddyl.ContactModelMultiple(self.state, nu)
supportContactModel = crocoddyl.ContactModel6D(
self.state, i, pin.SE3.Identity(), pin.LOCAL_WORLD_ALIGNED, nu, np.array([0.0, 50.0]),
)
contactModel.addContact(self.rmodel.frames[i].name + "_contact", supportContactModel)6. Trajectory Planning
Prediction Horizon and Gait Phases
- Prediction horizon: time steps, each of duration
- Phases: Double support, before swing, swing, zero velocity
Implementation:
doubleSupport = [self.createSwingFootModel(x0, timeStep, [self.rfId, self.lfId], RL_StairN=self.RL_StairN) for k in range(int(supportKnots*0.4))]
swingStepModels = self.createFootstepModels(...)
loco3dModel = doubleSupport + beforeSwing + swingStepModels + doubleSupport + doubleSupportZeroVel
problem = crocoddyl.ShootingProblem(x0, loco3dModel[:-1], loco3dModel[-1])Algorithmic Context: Main MPC Loop
The main loop of the Model Predictive Control (MPC) algorithm involves the continuous repetition of several key steps: state prediction, cost calculation, constraint handling, and optimization solver integration. This loop ensures that the exoskeleton's control inputs are updated in real-time, enabling it to follow the desired trajectory while adhering to the system's constraints.
Pseudo Code:
for t in range(timesteps):
# Predict future states
state_prediction()
# Calculate cost for predicted states and control inputs
cost_calculation()
# Handle constraints
constraint_handling()
# Solve the optimization problem
solver.solve(init_xs, init_us, maxiter, False, regInit)
# Update state and control inputs
update_state_and_control()Algorithmic Context: Walking Problem Generation
The MPC framework supports various walking scenarios, such as flat walk, terrain walk, rotation, and custom walk. Each scenario involves a specific sequence of kinematic and dynamic steps to generate the appropriate walking problem for the optimizer.
Flat Walk Problem Pseudo Code:
Algorithm CreateFlatWalkProblem(x0, step_x, step_y, stepHeight, timeStep,
stepKnots, supportKnots, taskSwingFoot, firstStep, doubleGen):
Initialize rmodel, rdata, state, actuation
Initialize frame IDs for rightFoot, leftFoot
Call forwardKinematics(rmodel, rdata, x0[:state.nq])
Call updateFramePlacements(rmodel, rdata)
if taskSwingFoot == "right":
taskSupportFootId = lfId
taskSwingFootId = rfId
else if taskSwingFoot == "left":
taskSupportFootId = rfId
taskSwingFootId = lfId
oRsupport = rdata.oMf[taskSupportFootId].rotation
oMsupport = rdata.oMf[taskSupportFootId]
Define stepSE3 as Identity SE3
stepSE3.rotation = oRsupport
stepSE3.translation = oMsupport * [step_x, step_y, 0.0]
stepSE3.translation[2] = 0.0
problem = CreateSwingFromSE3(x0, stepSE3, stepHeight, timeStep, stepKnots,
supportKnots, taskSwingFoot, firstStep, doubleGen)
return problemTerrain Walk Problem Pseudo Code:
Algorithm CreateTerrainWalkProblem(x0, step_x, step_y, stepHeight, timeStep,
stepKnots, supportKnots, taskSwingFoot, firstStep,
doubleGen,
terrainNormal, terrainMidZ):
Initialize rmodel, rdata, state, actuation
Initialize frame IDs for rightFoot, leftFoot
Call forwardKinematics(rmodel, rdata, x0[:state.nq])
Call updateFramePlacements(rmodel, rdata)
if taskSwingFoot == "right":
taskSupportFootId = lfId
taskSwingFootId = rfId
else if taskSwingFoot == "left":
taskSupportFootId = rfId
taskSwingFootId = lfId
oRsupport = rdata.oMf[taskSupportFootId].rotation
oMsupport = rdata.oMf[taskSupportFootId]
Define stepSE3 as Identity SE3
stepSE3.rotation = GetNewFootOrientation(oRsupport, terrainNormal)
stepSE3.translation = oMsupport * [step_x, step_y, 0.0]
stepSE3.translation[2] = terrainMidZ
problem = CreateSwingFromSE3(x0, stepSE3, stepHeight, timeStep, stepKnots,
supportKnots, taskSwingFoot, firstStep, doubleGen, terrain="uneven")
return problem
Function GetNewFootOrientation(R_foot, n):
Normalize n
zw_foot_new = n
xw_foot_new = Project xw_foot onto the plane defined by n and normalize
yw_foot_new = Cross product of n and xw_foot_new
R_foot_new = Construct rotation matrix from xw_foot_new, yw_foot_new, zw_foot_new
return R_foot_newRotation Problem Pseudo Code:
Algorithm CreateRotationProblem(x0, stepYaw, stepHeight, timeStep, stepKnots,
supportKnots, taskSwingFoot, firstStep, doubleGen, terrainNormal, terrainMidZ):
Initialize rmodel, rdata, state, actuation
Initialize frame IDs for rightFoot, leftFoot
Call forwardKinematics(rmodel, rdata, x0[:state.nq])
Call updateFramePlacements(rmodel, rdata)
if taskSwingFoot == "right":
taskSupportFootId = lfId
taskSwingFootId = rfId
stepYaw = -deg2rad(stepYaw)
else if taskSwingFoot == "left":
taskSupportFootId = rfId
taskSwingFootId = lfId
stepYaw = deg2rad(stepYaw)
Calculate new foot position [stepXY, rotYaw] using CalcRotFootPos(stepYaw, taskSwingFoot,
rdata.oMf[rfId], rdata.oMf[lfId])
Define footFlatSE3 as Identity SE3
footFlatSE3.rotation = rpyToMatrix([0, 0, rotYaw]) @ rdata.oMf[taskSwingFootId].rotation
footFlatSE3.translation[:2] = stepXY
Define footTerrainSE3 as Identity SE3
footTerrainSE3.rotation = GetNewFootOrientation(footFlatSE3.rotation, terrainNormal)
footTerrainSE3.translation[:2] = stepXY
footTerrainSE3.translation[2] = terrainMidZ
problem = CreateSwingFromSE3(x0, footTerrainSE3, stepHeight, timeStep,
stepKnots, supportKnots, taskSwingFoot, firstStep, doubleGen)
return problem
Function CalcRotFootPos(rotYaw, direction, rfSE3, lfSE3):
Define L as 0.1
Define rotMat as rotation matrix for rotYaw
Calculate xy_footRight and xy_footLeft using frame placements
if direction == "right":
l_hypo = L/2 * 1/sin(abs(rotYaw/2))
o_rot = l_HR + l_hypo * (l_HR - l_FR) / norm(l_HR - l_FR)
o_r_dummy = l_HR + l_FR - xy_footLeft - o_rot
xy_footRight = rotMat @ o_r_dummy + o_rot
return [xy_footRight, rotYaw]
else if direction == "left":
r_hypo = L/2 * 1/sin(abs(rotYaw/2))
o_rot = r_HL + r_hypo * (r_HL - r_FL) / norm(r_HL - r_FL)
o_l_dummy = r_FL + r_HL - xy_footRight - o_rot
xy_footLeft = rotMat @ o_l_dummy + o_rot
return [xy_footLeft, rotYaw]Custom Walk Problem Pseudo Code:
Algorithm CreateCustomWalkProblem(x0, step_x, step_y, stepHeight, stepYaw, timeStep,
stepKnots, supportKnots, taskSwingFoot, firstStep, doubleGen, terrainNormal, terrainMidZ):
Initialize rmodel, rdata, state, actuation
Initialize frame IDs for rightFoot, leftFoot
Call forwardKinematics(rmodel, rdata, x0[:state.nq])
Call updateFramePlacements(rmodel, rdata)
if stepYaw > 90:
Raise ValueError("stepYaw should be less than 90 degrees")
if taskSwingFoot == "right":
taskSupportFootId = lfId
taskSwingFootId = rfId
stepYaw = -deg2rad(stepYaw)
else if taskSwingFoot == "left":
taskSupportFootId = rfId
taskSwingFootId = lfId
stepYaw = deg2rad(stepYaw)
Calculate new foot position [stepXY, rotYaw] using CalcRotFootPos(stepYaw,
taskSwingFoot, rdata.oMf[rfId], rdata.oMf[lfId])
Define footFlatSE3 as Identity SE3
footFlatSE3.rotation = rpyToMatrix([0, 0, rotYaw]) @ rdata.oMf[taskSwingFootId].rotation
footFlatSE3.translation[:2] = stepXY
Define footTerrainSE3 as Identity SE3
footTerrainSE3.rotation = GetNewFootOrientation(footFlatSE3.rotation, terrainNormal)
footTerrainSE3.translation[:2] = stepXY
footTerrainSE3.translation[2] = terrainMidZ
if taskSwingFoot == "right":
taskSupportFootId = lfId
step_y = -step_y
else if taskSwingFoot == "left":
taskSupportFootId = rfId
oMsupport = rdata.oMf[taskSupportFootId]
footTerrainSE3.translation = oMsupport * [step_x, step_y, 0.0]
footTerrainSE3.translation[2] = terrainMidZ
problem = CreateSwingFromSE3(x0, footTerrainSE3, stepHeight, timeStep,
stepKnots, supportKnots, taskSwingFoot, firstStep, doubleGen)
return problem7. Optimization and Solver
Forward and Inverse Dynamics
- Forward dynamics:
Implementation:
dmodel = crocoddyl.DifferentialActionModelContactFwdDynamics(self.state, self.actuation, contactModel, costModel, 0.0, True)- Inverse dynamics:
Implementation:
dmodel = crocoddyl.DifferentialActionModelContactInvDynamics(self.state, self.actuation, contactModel, costModel)DDP Solver
- Backward Pass:
- Optimal control law:
- Forward Pass:
Where is the feedback gain matrix.
Implementation:
ddp = crocoddyl.SolverBoxFDDP(problem)
ddp.th_stop = 1e-9
init_xs = [self.x_last] * (problem.T + 1)
init_us = []
maxiter = 10000
regInit = 0.1
feasibility = ddp.solve(init_xs, init_us, maxiter, False, regInit)
if not feasibility:
raise RuntimeError("The optimal control problem is not feasible")8. Results, Features, Future Directions, Conclusion
Implementation and Results
The MPC framework was implemented using the following key components:
- Dynamic Model: A comprehensive multibody dynamics model of the exoskeleton
- Optimization Solver: DDP-based solver for handling nonlinearities
- Constraint Management: Barrier functions for state and control constraints
- Real-time Implementation: Efficient computation for real-time control
Simulation Results
Below are results from the MPC framework in simulation, demonstrating robust and adaptive walking behaviors in various scenarios:
Future Directions
- Real-time Optimization: Development of faster optimization algorithms for real-time control
- Machine Learning Integration: Incorporation of learning-based methods for enhanced prediction
- Complex Terrain Adaptation: Extension to handle diverse operational scenarios
- User-Specific Adaptation: Personalization of control parameters based on user characteristics
Conclusion
Model Predictive Control provides a powerful framework for controlling powered lower-body exoskeletons. The combination of predictive capabilities, optimal performance, and explicit constraint handling makes MPC particularly suitable for these complex robotic systems. Future research will focus on improving real-time performance and expanding the range of applications.