Trajectory Analysis & Optimization UI for Bipedal Robots (Real-Time Kinematics & Visualization)
Overview
The Trajectory Analysis & Optimization UI is a robust, user-friendly platform designed for real-time analysis and optimization of bipedal robot motion trajectories. Built to handle the demands of real-world exoskeleton and bipedal robot experiments, this UI empowers researchers and engineers to:
- Seamlessly analyze joint angle and sensor data in a user-friendly way
- Visualize complex trajectories from real-world experiments
- Modify trajectories in real-time using both forward and inverse kinematics
- Incorporate immediate user feedback for rapid iteration
- Efficiently process and visualize massive datasets (e.g., 6,300,000+ data points per minute)
Trajectory Analysis UI DemoKey Features
- User-Friendly Data Analysis: Intuitive interface for exploring joint angles, sensor data, and kinematic states.
- Real-Time Trajectory Visualization: Instantly plot and inspect trajectories from exoskeleton/bipedal robot experiments.
- Kinematics Integration: Modify and optimize trajectories using both forward and inverse kinematics, with immediate visual feedback.
- Rapid Testing & Iteration: Quickly test new trajectories and incorporate user feedback for efficient optimization.
- Scalable Data Handling: Designed to process and visualize millions of data points per minute without lag.
- 3D Robot Visualization: Interactive Meshcat viewer for real-time robot pose and trajectory visualization.
Technical Deep Dive
Data Pipeline
1. Data Ingestion
- CSV Upload: Users upload trajectory or sensor CSV files via the UI.
- Backend Parsing: The backend (backend/routes/upload.py, backend/services/data_processor.py) parses and standardizes the data, handling both single-level and multi-level CSV headers.
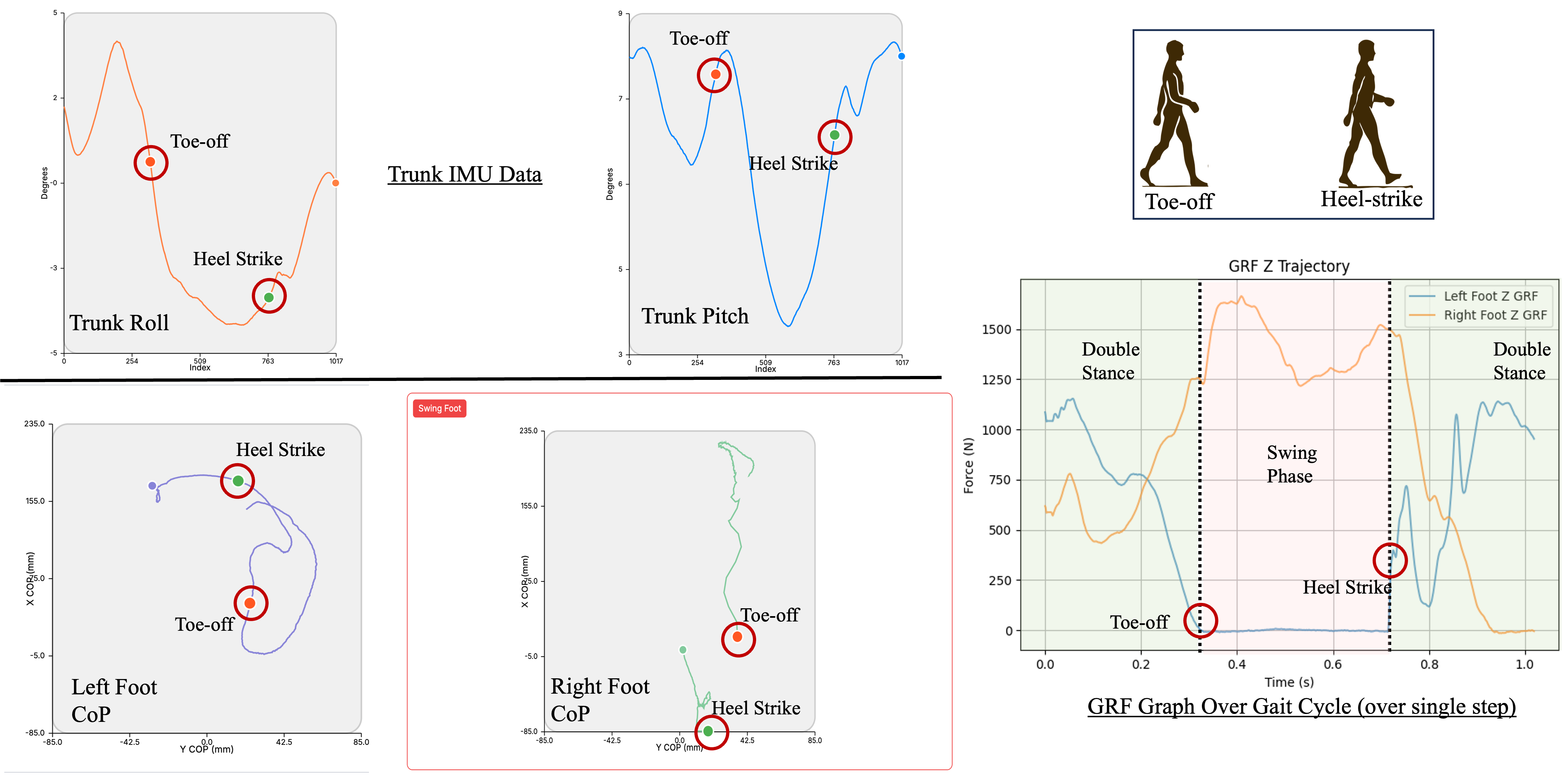
- State Segmentation: The pipeline identifies gait phases (e.g., right/left swing) using state columns, extracting relevant sequences for analysis.
2. Data Processing
- Standardization: Columns are mapped to canonical names (e.g., 'LFootCOP_x', 'RH_Abd_Ref').
- Sequence Extraction: The backend extracts and segments time-series data for each gait phase.
- Analysis: The system computes statistics and features (via perform_data_analysis) for each segment, supporting downstream visualization and optimization.
Example: Data Processing Code
def process_data(filepath, right_swing_state, left_swing_state):
df = pd.read_csv(filepath)
# ... column mapping and cleaning ...
right_swing_sequences = get_sequences(right_swing_state)
left_swing_sequences = get_sequences(left_swing_state)
# ... extract and analyze ...
processed_data['analysis_results'] = perform_data_analysis(processed_data)
return processed_dataForward Kinematics
Forward kinematics (FK) computes the position and orientation of the robot's links (e.g., feet, base) from joint angles.
- URDF Model Loading: The robot model is loaded from URDF using Pinocchio.
- FK Computation: For each time step in the trajectory, the system computes the pose of the base and feet using Pinocchio's forwardKinematics and updateFramePlacements.
- Result: The FK results are used for both 2D/3D plotting and as input to the visualization and optimization modules.
Example: FK Code
for q in joint_traj:
pin.forwardKinematics(walkon_solo.model, walkon_solo.data, q)
pin.updateFramePlacements(walkon_solo.model, walkon_solo.data)
base_pose = walkon_solo.data.oMf[base_frame]
right_foot_pose = walkon_solo.data.oMf[right_foot_frame]
left_foot_pose = walkon_solo.data.oMf[left_foot_frame]Inverse Kinematics for Trajectory Optimization
Inverse kinematics (IK) is used to compute joint angles that achieve a desired end-effector (e.g., foot) pose, enabling trajectory modification and optimization.
- IK Loop: For each time step, the system iteratively updates joint angles to minimize the error between the current and desired foot poses.
- Jacobian-Based Solver: The solver uses the robot's Jacobian and a damped least-squares approach for stable convergence.
- Trajectory Editing: Users can modify base or foot trajectories in the UI; the backend recomputes joint angles via IK to realize these changes.
Example: IK Algorithm
for t in range(len(joint_traj)):
q = q_original.copy()
# Set desired base pose
q[0:3] = modified_base_pose.translation
# ... quaternion update ...
for i in range(max_iter):
pin.forwardKinematics(model, data, q_full)
pin.updateFramePlacements(model, data)
# Compute error and Jacobian
error = ... # pose error
J = ... # stacked Jacobian
dq_j = -dt * np.linalg.solve(J.T @ J + lambda_damping * np.eye(J_T.shape[1]), J.T @ error)
q_j += dq_j
# Check for convergence- Convergence: The solver checks for convergence at each iteration, ensuring the solution is physically plausible and smooth.
3D Visualization with Meshcat
- Meshcat Integration: The backend uses Meshcat to provide real-time, interactive 3D visualization of the robot and its trajectories.
- Live Updates: As users modify trajectories or run IK, the robot's pose in Meshcat updates instantly.
- Web Embedding: The Meshcat viewer is embedded in the frontend, allowing users to rotate, zoom, and inspect the robot in 3D.
Meshcat Setup
display = crocoddyl.MeshcatDisplay(
walkon_solo, frameNames=[rightFoot, leftFoot, "RfootFC", "RfootHC", "LfootFC", "LfootHC"]
)
vis = display.robot.viewer
display.display(xs=xs, fs=fs, ps=ps, com_traj=com_traj, com_proj_traj=com_proj_traj, dts=dts, factor=1.0)Frontend: Real-Time UI
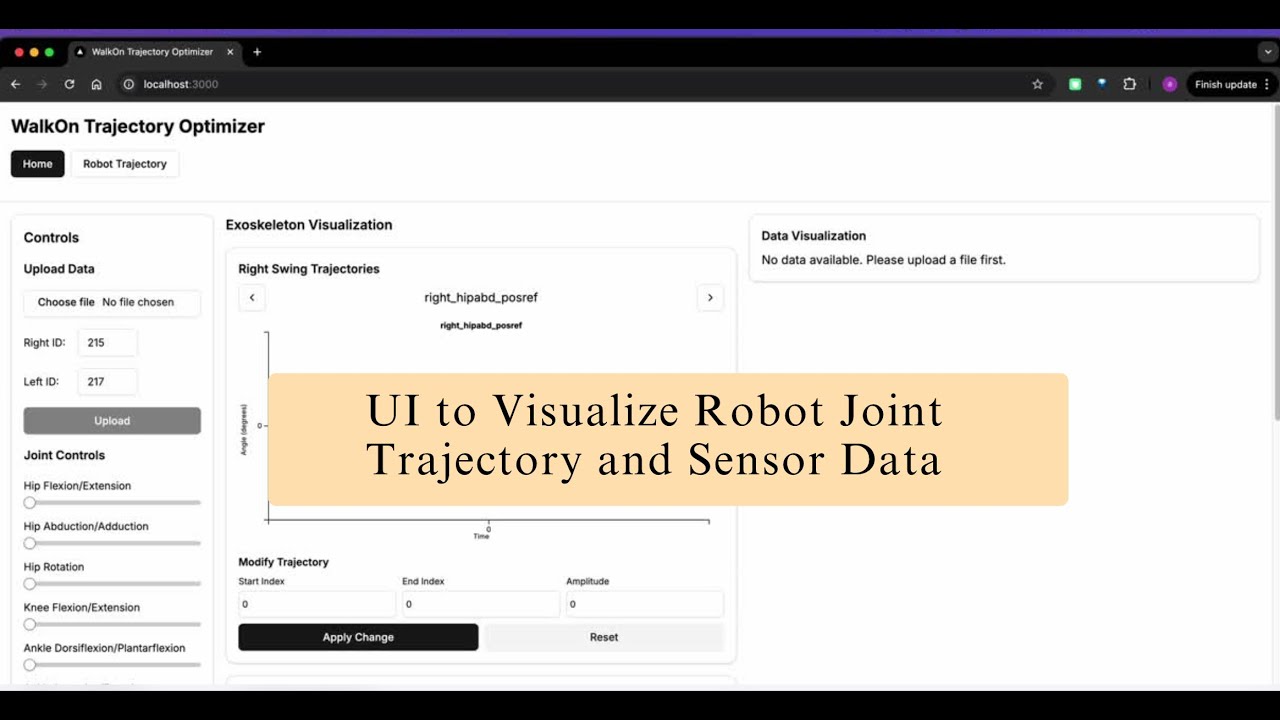
- Built with Next.js and React: Modern, responsive, and highly interactive.
- High-Performance Charts: Uses Plotly for 2D/3D plotting of joint angles, base/foot trajectories, and sensor data.
- Parameter Controls: Users can adjust offsets, ranges, and smoothing for trajectory segments.
- Live Feedback: All changes are reflected in real-time in both plots and the Meshcat 3D viewer.
- File Upload/Download: Users can import/export trajectory data for offline analysis or deployment.
Backend: FastAPI & Robotics Stack
- Python FastAPI/Flask: Exposes RESTful endpoints for data upload, processing, and kinematics computation.
- Pinocchio & Crocoddyl: State-of-the-art libraries for efficient kinematics, dynamics, and optimal control.
- Pandas/Numpy: High-throughput data processing for large-scale experimental datasets.
- URDF-Based Modeling: Supports complex, high-DOF bipedal robots and exoskeletons.
How to Use
-
Start the Backend:
Ensure all Python dependencies are installedLaunch the FastAPI/Flask server.TEXTcode.txtpip install -r requirements.txt -
Start the Frontend:
Install Node.js dependenciesRun the Next.js appTEXTcode.txtnpm installTEXTcode.txtnpm run dev -
Upload Data:
Use the UI to upload your robot trajectory or sensor CSV files. -
Analyze & Edit:
Explore the data, visualize trajectories, and use the UI controls to modify trajectories. -
Optimize with IK:
Apply inverse kinematics to realize your desired trajectory modifications. -
Visualize in 3D:
Inspect the robot's motion in the embedded Meshcat viewer.
Demo Video
Watch a live demo of the Trajectory Analysis & Optimization UI in action:
Impact
- Massive efficiency boost for real-world trajectory testing and optimization
- Enables rapid prototyping and deployment of new motion strategies for bipedal robots and exoskeletons
- Bridges the gap between raw experimental data and actionable insights for robotics research
References
- Pinocchio: Fast Forward and Inverse Kinematics
- Crocoddyl: Optimal Control for Robotics
- Meshcat: 3D Visualization for Robotics
- Plotly.js: High-Performance Charting
Acknowledgements
This project leverages open-source robotics libraries and is inspired by the needs of real-world bipedal robot and exoskeleton research.
Source Code
You can find the full source code for the Trajectory Analysis & Optimization UI on GitHub:
https://github.com/abhirajsingh101/WalkOn-Optimizer